![[논문 리뷰] SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics](/assets/img/250731/image.png)
[논문 리뷰] SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics
작성자: 이동진
논문 정보
제목: SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics
저자: Mustafa Shukor et al., Sorbonne University & Hugging Face.
학회: Preprint
Overview
- Target task: Imitation Learning
- Algorithm class: Vision-language-action (VLA) model
- Motivation
- Impactful한 VLA 모델들의 경우 독점적으로 발전해왔다.
- 즉, model은 공개되어 있어도 데이터셋이나 훈련 디테일, 중요한 방법론들은 공유되지 않은 경우가 많다.
- NLP나 CV 분야처럼 발전하기 위해서는 transparent, reproducible open-source model과 training recipes 공유가 중요하다.
- 기존의 open-sourced VLA는 너무 크고 resource-intensive하며 비싼 robotic platforms이 필요하다.
- Impactful한 VLA 모델들의 경우 독점적으로 발전해왔다.
- Solution
- Affordable
- 저가형 로봇들 및 규격화된 로봇틱스 library 덕분에 practitioner들이 쉽게 로봇틱스 분야에 진입할 수 있게 만듦
- Practitioners들이 각자 다양한 환경에서 수집하여 공유한 community dataset을 사용하여 VLA 모델 훈련
- Efficient
- 작은 VLM 모델 사용 (SmolVLM-2)
- Layer skipping (사전 훈련된 VLM의 마지막 layer의 embedding vector를 사용하지 않고 중간 layer의 embedding vector를 사용)
- Asynchronous inference stack
- $t$ 시점의 VLM model의 출력 $o_t$를 policy server에 보내서 $n$개의 행동 (action sequence) 출력
- $k \le n$ step 후에 $o_{t+n}$을 policy server에 보내서 $n$개의 행동 (action sequence) 출력
- 중복된 영역은 aggregate
- Affordable
Introduction
Robotics 분야의 경우, 현실 세계에 foundation model을 적용하는 것은 어려운 문제
- 다양한 object types, positions, surrounding environments, tasks에 대해 잘 작동하도록 일반화 필요
- Agent 입장에서는 주변 환경에 대한 common sense 이해와 robust skills 학습이 요구됨
- 하지만 질 좋고 다양성이 확보된 데이터셋이 없어서 foundation model 개발이 제한적
Vision-language-action (VLA) model이 robotics 분야에서의 foundation model로 대두
- 사전훈련된 vision-language model (VLM)을 이용하여 abstract reasoning과 world knowledge를 embedding
- Action expert로 decision making skills 학습
Open-sourced light weight model 필요성
- Impactful한 VLA 모델들의 경우, model은 공개되어 있어도 데이터셋, 훈련 디테일, 중요한 방법론들은 공유되지 않은 경우가 많다.
- NLP나 CV 분야처럼 발전하기 위해서는 transparent, reproducible open-source model과 training recipes 공유가 중요하다.
- 기존의 open-sourced VLA는 너무 크고 resource-intensive하며 비싼 robotic platforms이 필요하다.
SmolVLA: small, efficient and capable
입력 및 출력
입력 데이터
- 여러 개의 RGB 카메라 촬영된 이미지 ⇒ Vision encoder로 입력되어 visual token embeddings가 됨
- Task를 설명하는 텍스트 프롬프트 ⇒ 토큰화 후 임베딩 레이어 거쳐서 language token embeddings
- 로봇의 sensorimotor states ⇒ Linear layer 거쳐서 차원 수 맞춰 줌
중간 과정
- 1, 2, 3에서 나온 벡터들은 concatenate되어 LLM 모델에 입력
- 중간 레이어까지 거쳐서 나온 임베딩 벡터가 Action Expert (Flow matching Transformer)로 입력됨
출력 데이터
- Action sequence
VLM 모델로 SmolVLM-2 (Hugging Face, 2025)을 사용
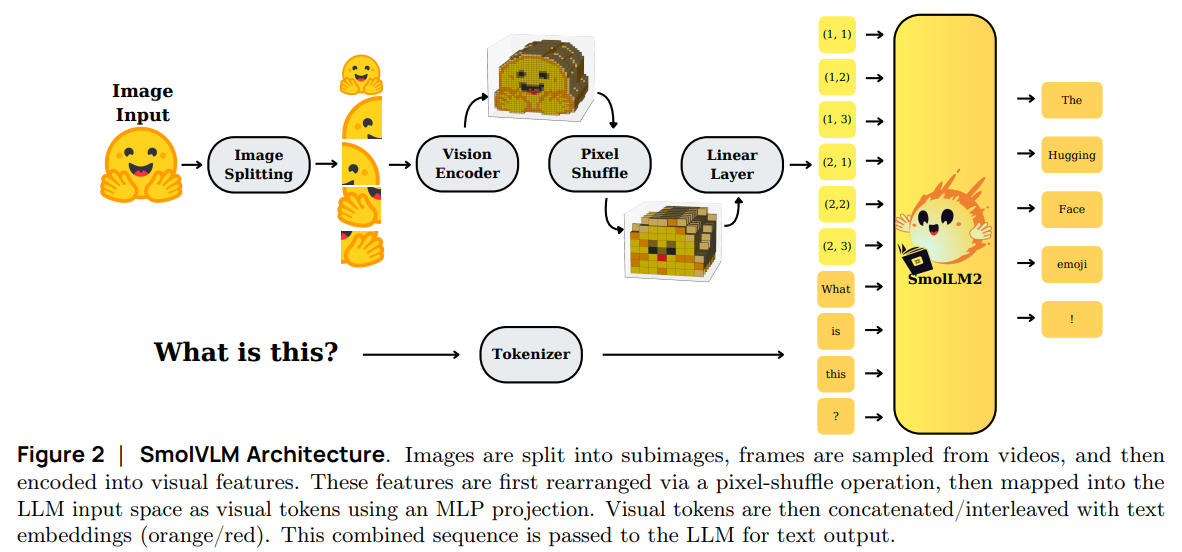
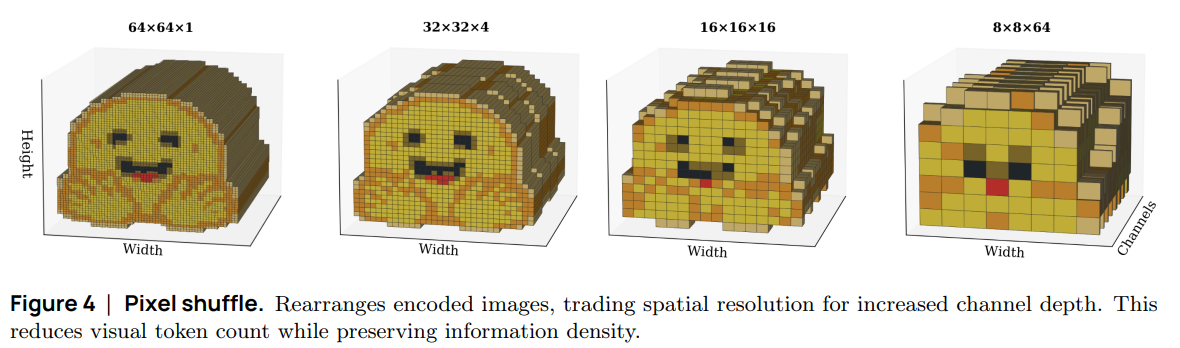
- Visual encoder는 ViT-g + pixel shuffling 사용
- ViT-g 입력: $512\times512$ 크기 이미지
- ViT-g 출력: $32\times32=1024$ 개의 token embeddings 생성
-
Pixel shuffling 으로 $8\times8=64$개의 token embeddings으로 압축
- Text decoder (language model)는 SmolLM (Hugging Face, 2025) 사용
- Llama-2인데 더 작은 모델 (1.7B)
- Pretraining 기법으로는 SigLIP (Google Research, 2023) 사용
- CLIP처럼 visual features와 text features를 contrastive learning로 alignment 해주는 기법
Action Expert: Flow matching Transformer
- 입력: 기존 24개의 레이어를 갖는 VLM 모델 중 첫 16개의 layers만 사용
- 출력: sequence of $n=50$ actions
- 기타: 층마다 self attention과 cross attention (to VLM features)를 번갈아 가면서 사용
Pretraining data collected by the community
Motivation
- 데이터 수집의 어려움
- Human expert가 teleoperation을 통해 데이터 수집을 해야 하기 때문에 비용이 많이 듦
- 데이터셋마다 로봇 형태, 센서, actuation modes, 제어 주기, 데이터 포맷이 모두 다르기 때문에 여러 데이터셋을 통합해서 사용하기 어려움
- 저가형 로봇들 및 규격화된 로봇틱스 library 덕분에 practitioner들이 쉽게 로봇틱스 분야에 진입할 수 있게 만듦
Community dataset
- Practitioners들이 모은 데이터셋
- 연구소에서 규격화된 환경에서 수집한 데이터셋과 다르게 자연히 다양한 로봇 형태, 제어 스키마, 카메라 각도, 테스크, real-world 주변 환경 등을 통해 다양성이 확보됨
- HuggingFace에 공유된 481개의 데이터셋 (22.9K 에피소드, 10.6M frames)을 사용하여 사전훈련
Asynchronous inference
Action chunking: 현재 시점 $t$ 에서 $n=50$ 개의 actions $\mathbf{A}t=(a_t, a{t+1}, \ldots, a_{t+n-1})$ 를 출력
$\mathbf{A}_t$로부터 환경과 상호작용하는 방법 두 가지
- Open loop control
- $\mathbf{A}_t$를 다 소진할 때까지 환경과 상호작용. 중간 상태에서 action sequence 계산하지 않음
- 단점: 로봇이 $\mathbf{A}_t$를 계산되는 동안 대기해야 하는 idle gaps 발생
- Closed loop control
- 매 $t$마다 $\mathbf{A}_t$를 계산하고 이전에 계산해놓은 행동들과 aggregation하여 사용
- 단점: Computationally expensive하기 때문에 edge device에서는 사용이 불가능
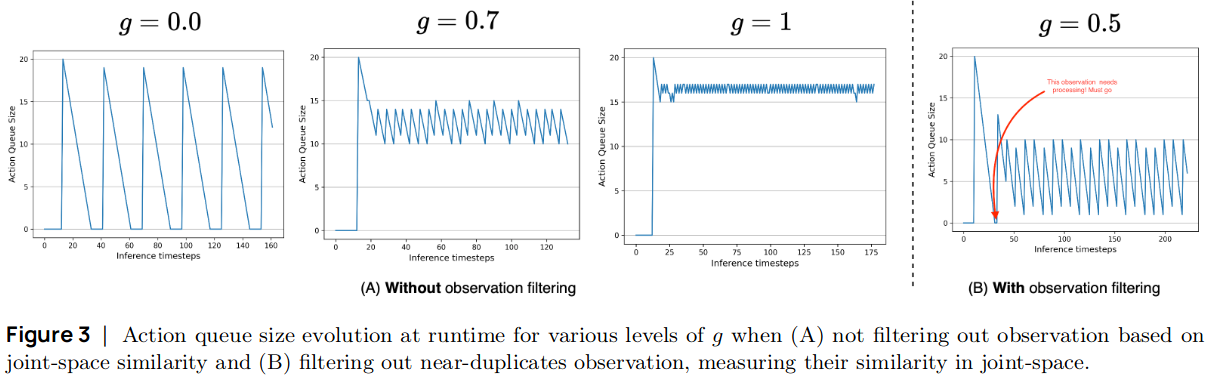
Asynchronous inference
- 로봇에서 $\mathbf{A}_t$를 계산하는대신 원격 PolicyServer로 $o_t$를 전송
- PolicyServer는 $\mathbf{A}_t$가 계산되면 하나씩 pop해서 로봇에게 전송
- $k \le n$ 개의 행동이 소진되면 로봇은 $o_{t+k}$를 로봇에게 전송
- threshold $g\in[0, 1]$를 정해놓고 $\frac{\mid\mathbf{A}_t\mid}{n} \le g$이 되면 전송하는 방식
- 겹치는 일부 actions는 aggregation하여 사용
Experiments
Real-world tasks
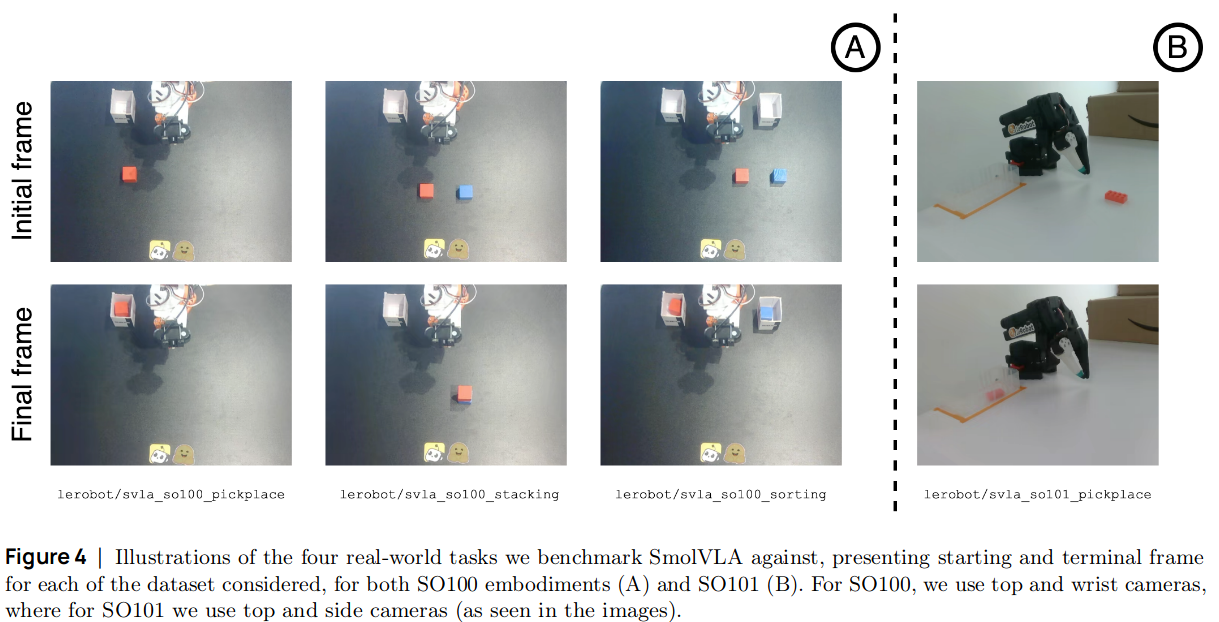
Community dataset으로 사전학습된 VLA를 3개의 tasks에 대한 데이터셋에 fine-tuning하여 task 성공률을 evaluation
- SO-100 로봇 데이터셋 3개 (Pick and placing, Stacking, Sorting)
- SO-101 로봇 데이터셋 1개 (Pick and placing)
- 각 데이터셋은 5개의 서로 다른 starting position마다 10개의 trajectories가 제공되어 50개의 trajectories를 포함하고 있음
Task prompt
- Pick and placing: “pick up the cube and place it in the box.”
- Stacking: “pick up the red cube and put it on top of the blue cube.”
- Sorting: “put the red cube in the right box and the blue cube in the left box.”
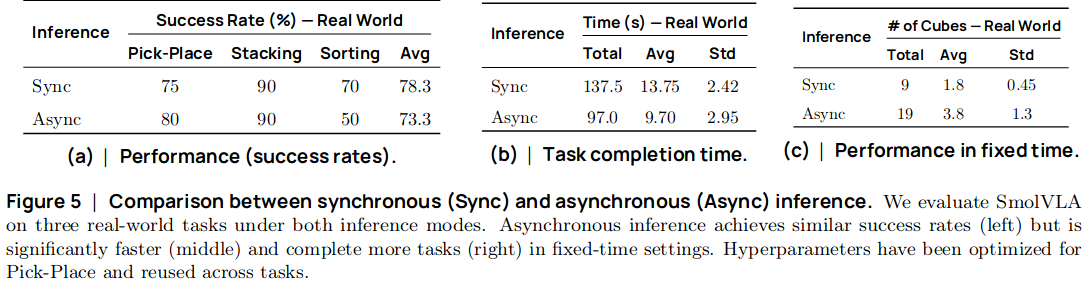
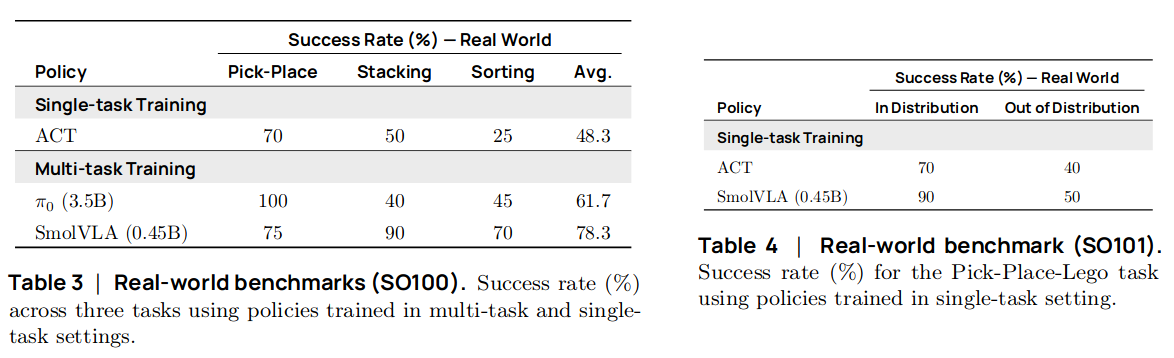
벤치마킹 결과 (w/ pretraining, open-loop control)
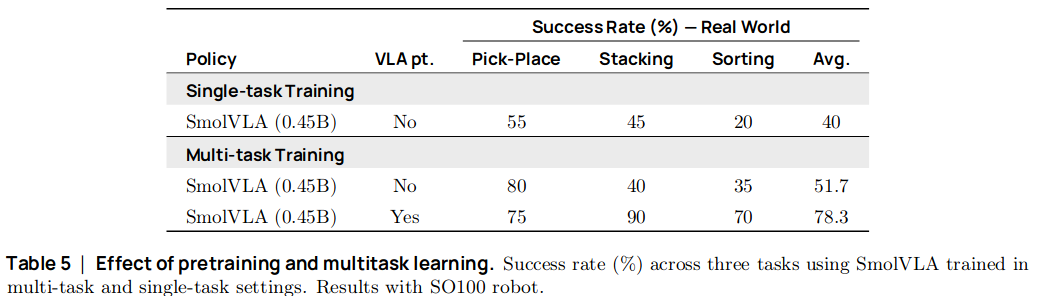
Ablation 1. Community dataset으로 사전학습을 한 경우와 안 한 경우
Ablation 2. Open-loop control vs. asynchronous inference